- Kataloge
- FAULHABER Drive Systems
- MC 3602 B
MC 3602 B
1 /2Seiten
MC 3602 B
1 /2Seiten
Katalogauszüge

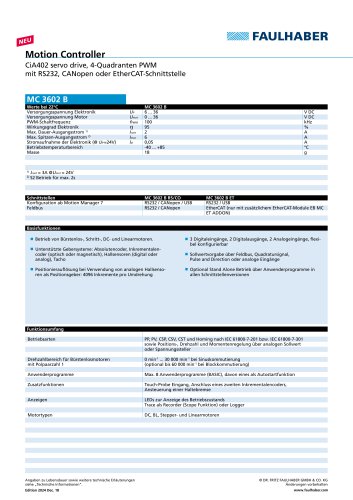
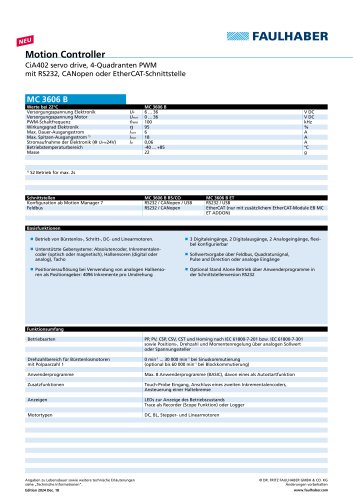
Motion Controller CiA402 servo drive, 4-Quadranten PWM mit RS232, CANopen oder EtherCAT-Schnittstelle MC 3602 B Werte bei 22°C Versorgungsspannung Elektronik Versorgungsspannung Motor PWM-Schaltfrequenz Wirkungsgrad Elektronik Max. Dauer-Ausgangsstrom 1) Max. Spitzen-Ausgangsstrom 2) Stromaufnahme der Elektronik (@ UP =24V) Betriebstemperaturbereich Masse Icont = 3A @Umot = 24V S2 Betrieb für max. 2s Schnittstellen Konfiguration ab Motion Manager 7 Feldbus MC 3602 B RS/CO RS232 / CANopen / USB RS232 / CANopen MC 3602 B ET RS232 / USB EtherCAT (nur mit zusätzlichem EtherCAT-Module EB MC ET ADDON) ■ Betrieb von Bürstenlos-, Schritt-, DC- und Linearmotoren. ■ Unterstützte Gebersysteme: Absolutencoder, Inkrementalencoder (optisch oder magnetisch), Hallsensoren (digital oder analog), Tacho ■ Positionierauflösung bei Verwendung von analogen Hallsensoren als Positionsgeber: 4096 Inkremente pro Umdrehung ■ 3 Digitaleingänge, 2 Digitalausgänge, 2 Analogeingänge, flexibel konfigurierbar ■ Sollwertvorgabe über Feldbus, Quadratursignal, Pulse and Direction oder analoge Eingänge ■ Optional Stand Alone Betrieb über Anwenderprogramme in allen Schnittstellenversionen Funktionsumfang Betriebsarten PP, PV, CSP, CSV, CST und Homing nach IEC 61800-7-201 bzw. IEC 61800-7-301 sowie Positions-, Drehzahl und Momentenregelung über analogen Sollwert oder Spannungssteller Drehzahlbereich für Bürstenlosmotoren mit Polpaarzahl 1 Max. 8 Anwenderprogramme (BASIC), davon eines als Autostartfunktion Touch-Probe Eingang, Anschluss eines zweiten Inkrementalencoders, Ansteuerung einer Haltebremse LEDs zur Anzeige des Betriebszustands Trace als Recorder (Scope Funktion) oder Logger Angaben zu Lebensdauer sowie weitere technische Erläuterungen siehe „Technische Informationen“. Edition 2024 Dec. 18 © DR. FRITZ FAULHABER GMBH & CO. KG Änderung
Katalog auf Seite 1 öffnen
Maßzeichnung Abbildungen verkleinert MC 3602 B RS/CO Optionen und Anschlussinformationen Beispiel zur Produktkennzeichnung: MC 3602 B RS/CO Funktion Micro B-USB-Stecker Board-to-Board-Micro-Stecker Beschreibung Analoge und digitale Ein-/Ausgänge, Motor- und Elektronikversorgung, Feldbusse, Motorphasen, Sensorik Evaluierungsboard MC3602 / MC3606 ET EtherCAT-Modul EB MC ET ADDON Hinweis: Details zur Anschlussbelegung siehe Gerätehandbuch MC 3602 B. Für nähere Informationen zu Motherboard-Anschlüssen und -Funktionen, siehe Gerätehandbuch MC 3602 B. Bürstenlose DC-Motoren Lineare DC-Servomotoren...
Katalog auf Seite 2 öffnenAlle Kataloge und technischen Broschüren von FAULHABER Drive Systems
 FAULHABER motion 2025
FAULHABER motion 202536 Seiten
 MC 3606B- DE
MC 3606B- DE2 Seiten
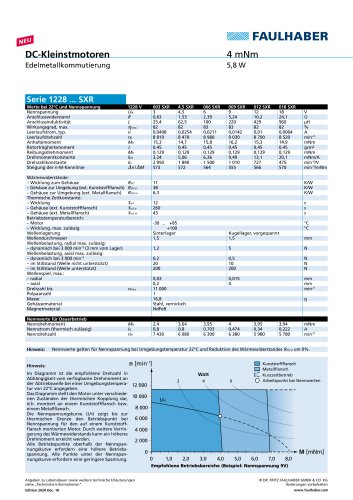 Serie 1228 ... SXR
Serie 1228 ... SXR2 Seiten
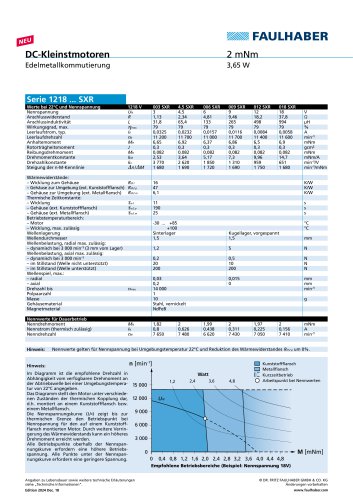 Serie 1218 ... SXR
Serie 1218 ... SXR2 Seiten
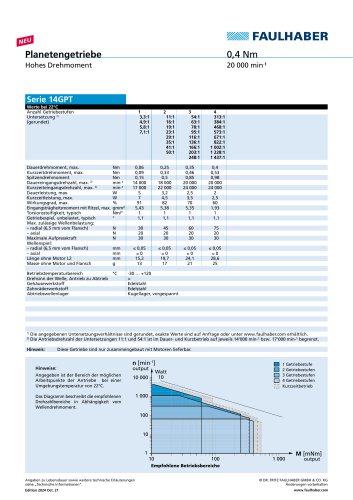 14GPT
14GPT2 Seiten
 IEP3-4096
IEP3-40963 Seiten
 Series 2233 ... S
Series 2233 ... S2 Seiten
 Series 2230 ... S
Series 2230 ... S2 Seiten
 Series 1624 ... S
Series 1624 ... S2 Seiten
 Series 1516 ... S
Series 1516 ... S2 Seiten
 Series 1219 ... G
Series 1219 ... G2 Seiten
 Series 0615...S
Series 0615...S2 Seiten
 Linearaktuatoren L series
Linearaktuatoren L series12 Seiten
 FAULHABER motion 1/2022
FAULHABER motion 1/202233 Seiten
 Faulhaber motion 02/2021
Faulhaber motion 02/202128 Seiten
 Das Magazin mit Antrieb
Das Magazin mit Antrieb28 Seiten
 Antriebssysteme | 2020-2021
Antriebssysteme | 2020-2021656 Seiten
 motion 1/2020
motion 1/202032 Seiten
 Antriebssysteme
Antriebssysteme40 Seiten
 Leistung in neuen Dimensionen
Leistung in neuen Dimensionen24 Seiten
 Serie 1509...B
Serie 1509...B2 Seiten
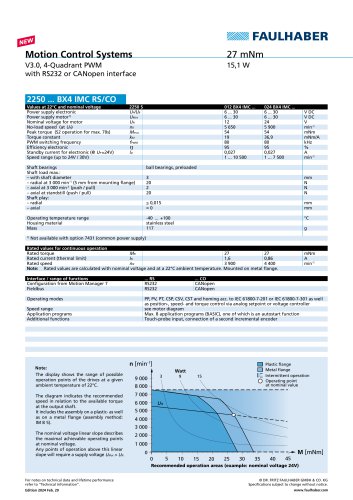 2250 ... BX4 IMC RS/CO
2250 ... BX4 IMC RS/CO2 Seiten
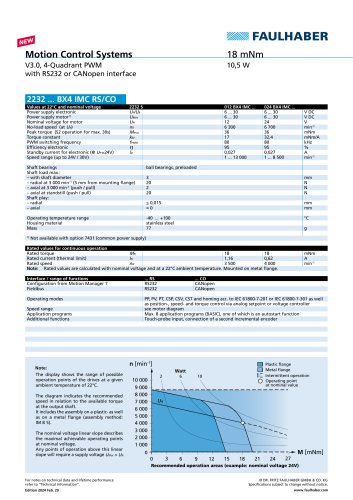 2232 ... BX4 IMC RS/CO
2232 ... BX4 IMC RS/CO2 Seiten
 Motion Controller MC 3603 S
Motion Controller MC 3603 S2 Seiten
 Series 1506...SR
Series 1506...SR2 Seiten
 Series 2657...CXR
Series 2657...CXR2 Seiten
 Series 1219...G
Series 1219...G2 Seiten
 Series 0816...SR
Series 0816...SR2 Seiten
 Series 2619...SR
Series 2619...SR1 Seite


- Mikromotor
- Elektrischer Mikromotor
- Antrieb
- Linearantrieb
- Elektroantrieb
- Motor für die medizinische Industrie
- Medizinischer Antrieb
- Bürstenloser Motor
- Bedienfeld für medizinische Geräte
- Medizinisches Kontrollsystem
- Labor-Kontrollsystem
- Medizinisch Mikromotor
- Servomotor für die medizinische Industrie
- DC-Servomotor
- DC-Mikromotor
- Kontinuierliches Kontrollsystem
- Bürstenloser Servomotor